
热点新闻
仿生机械手
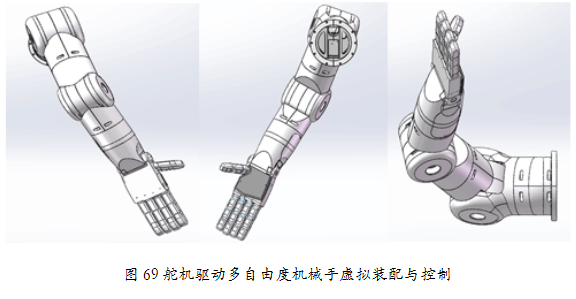
舵机驱动多自由度机械手虚拟装配与控制
发布时间:2015-09-22 作者: 来源: 浏览次数:
实验概况:使用SolidWorks三维绘图软件,完成机械零件的设计,并设计了舵机的安装位置。机械结构和原动件的布局走线是本科生必须掌握的内容。本虚拟实验采用SolidWorks软件,让学生根据所提供的装配图,在计算机上虚拟实现绳索欠驱动假肢手各零部件的拆装与调整,为学生掌握和实践工程制图,机械设计等课程的知识、明确各零部件之间相互连接和装配关系提供帮助与直观认识。
实验目标:巩固和加强机械制图和机械设计课程的理论知识;使学生将机械和电气控制结合起来,通过三维软件平台实现虚拟机械手的拆装,同时通过编程使机械手动起来,增强学生对机械兴趣和热情。
实验功能:通过对虚拟仿真软件对多舵机机械手模型的拆卸与装调,使学生掌握原动件的安装布局,同时通过计算机编程,实现机械手的简单控制,掌握舵机的基本驱动方法。
教学效果:使学生将机械和电气控制结合起来,通过三维软件平台实现虚拟机械手的拆装,同时通过编程使机械手动起来,增强学生对机械兴趣和热情。
上一篇:多轴机械臂的虚拟运动控制